feat: initial HSAP platform
Huaxu Sentinel Active Safety Platform with embedded algorithm code, Docker Compose setup, and vendored dataset scaffolds for clone-and-run. Co-authored-by: Cursor <cursoragent@cursor.com>
This commit is contained in:
@@ -0,0 +1,79 @@
|
||||
# Running Ultralytics YOLOv8 with TFLite Runtime
|
||||
|
||||
This guide demonstrates how to perform inference using an Ultralytics [YOLOv8](https://docs.ultralytics.com/models/yolov8/) model exported to the [TensorFlow Lite (TFLite)](https://ai.google.dev/edge/litert) format. TFLite is a popular choice for deploying machine learning models on mobile, embedded, and IoT devices due to its optimization for on-device inference with low latency and a small binary size. This example supports FP32, FP16, and INT8 quantized TFLite models.
|
||||
|
||||
## ⚙️ Installation
|
||||
|
||||
Before running inference, you need to install the necessary TFLite interpreter package. Choose the appropriate package based on your hardware (CPU or GPU).
|
||||
|
||||
### Installing `tflite-runtime` (Recommended for Edge Devices)
|
||||
|
||||
The `tflite-runtime` package is a smaller package that includes the bare minimum required to run inferences with TensorFlow Lite, primarily the `Interpreter` Python class. It's ideal for resource-constrained environments like Raspberry Pi or Coral Edge TPU.
|
||||
|
||||
```bash
|
||||
pip install tflite-runtime
|
||||
```
|
||||
|
||||
For more details, refer to the official [TFLite Python quickstart guide](https://ai.google.dev/edge/litert/microcontrollers/python).
|
||||
|
||||
### Installing Full `tensorflow` Package (CPU or GPU)
|
||||
|
||||
Alternatively, you can install the full TensorFlow package. This includes the TFLite interpreter along with the complete TensorFlow library.
|
||||
|
||||
- **CPU-Only:** Suitable if you don't have an NVIDIA GPU or don't need GPU acceleration.
|
||||
|
||||
```bash
|
||||
pip install tensorflow
|
||||
```
|
||||
|
||||
- **GPU Support:** To leverage NVIDIA GPU acceleration for potentially faster inference, install `tensorflow` with GPU support. Ensure you have the necessary [NVIDIA drivers](https://www.nvidia.com/Download/index.aspx) and CUDA toolkit installed.
|
||||
|
||||
```bash
|
||||
# Check TensorFlow documentation for specific CUDA/cuDNN version requirements
|
||||
pip install tensorflow[and-cuda] # Or follow specific instructions on TF website
|
||||
```
|
||||
|
||||
Visit the official [TensorFlow installation guide](https://www.tensorflow.org/install) for detailed instructions, including GPU setup.
|
||||
|
||||
## 🚀 Usage
|
||||
|
||||
Follow these steps to run inference with your exported YOLOv8 TFLite model.
|
||||
|
||||
1. **Export YOLOv8 Model to TFLite:**
|
||||
First, export your trained Ultralytics YOLOv8 model (e.g., `yolov8n.pt`) to the TFLite format using the `yolo export` command. This example exports an INT8 quantized model for optimal performance on edge devices. You can also export FP32 or FP16 models by adjusting the `format` and quantization arguments. Refer to the Ultralytics [Export mode documentation](https://docs.ultralytics.com/modes/export/) for more options.
|
||||
|
||||
```bash
|
||||
yolo export model=yolov8n.pt imgsz=640 format=tflite int8=True # Exports yolov8n_saved_model/yolov8n_full_integer_quant.tflite
|
||||
```
|
||||
|
||||
The export process will create a directory (e.g., `yolov8n_saved_model`) containing the `.tflite` model file and potentially a `metadata.yaml` file with class names and other model details.
|
||||
|
||||
2. **Run Inference Script:**
|
||||
Execute the provided Python script (`main.py`) to perform inference on an image. Adjust the arguments as needed for your specific model path, image source, confidence threshold, and IoU threshold.
|
||||
|
||||
```bash
|
||||
python main.py \
|
||||
--model yolov8n_saved_model/yolov8n_full_integer_quant.tflite \
|
||||
--img image.jpg \
|
||||
--conf 0.25 \
|
||||
--iou 0.45 \
|
||||
--metadata yolov8n_saved_model/metadata.yaml
|
||||
```
|
||||
|
||||
- `--model`: Path to the exported `.tflite` model file.
|
||||
- `--img`: Path to the input image for detection.
|
||||
- `--conf`: Minimum [confidence threshold](https://www.ultralytics.com/glossary/confidence) for detections (e.g., 0.25).
|
||||
- `--iou`: [Intersection over Union (IoU)](https://www.ultralytics.com/glossary/intersection-over-union-iou) threshold for Non-Maximum Suppression (NMS).
|
||||
- `--metadata`: Path to the `metadata.yaml` file generated during export (contains class names).
|
||||
|
||||
## ✅ Output
|
||||
|
||||
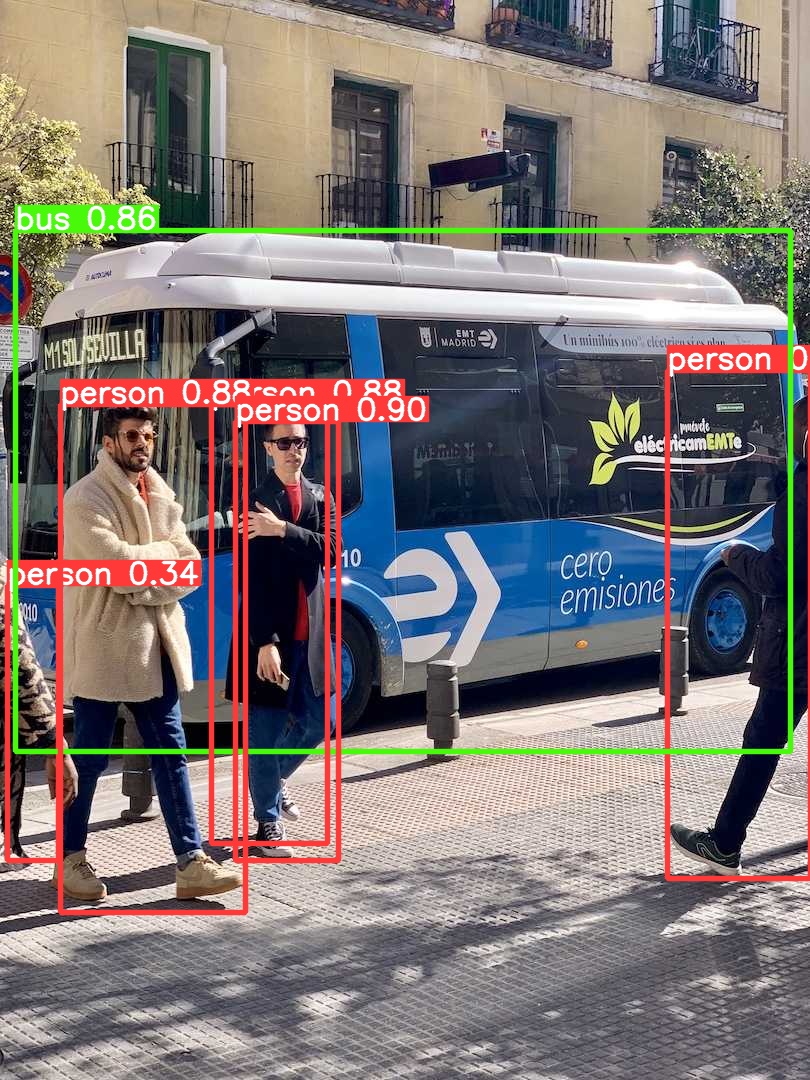
The script will process the input image using the specified TFLite model and display the image with bounding boxes drawn around detected objects. Each box will be labeled with the predicted class name and confidence score.
|
||||
|
||||
|
||||
|
||||
This example provides a straightforward way to deploy Ultralytics YOLOv8 models on devices supporting TFLite, enabling efficient **object detection** in various applications. Explore different [quantization](https://www.ultralytics.com/glossary/model-quantization) options and model sizes to find the best balance between performance and accuracy for your specific use case.
|
||||
|
||||
## 🤝 Contribute
|
||||
|
||||
Contributions to enhance this example or add new functionalities are welcome! Feel free to fork the [Ultralytics repository](https://github.com/ultralytics/ultralytics), make your changes, and submit a pull request.
|
||||
260
algorithms/dms_yolo/code/examples/YOLOv8-TFLite-Python/main.py
Normal file
260
algorithms/dms_yolo/code/examples/YOLOv8-TFLite-Python/main.py
Normal file
@@ -0,0 +1,260 @@
|
||||
# Ultralytics 🚀 AGPL-3.0 License - https://ultralytics.com/license
|
||||
|
||||
from __future__ import annotations
|
||||
|
||||
import argparse
|
||||
|
||||
import cv2
|
||||
import numpy as np
|
||||
import yaml
|
||||
|
||||
from ultralytics.utils import ASSETS
|
||||
|
||||
try:
|
||||
from tflite_runtime.interpreter import Interpreter
|
||||
except ImportError:
|
||||
import tensorflow as tf
|
||||
|
||||
Interpreter = tf.lite.Interpreter
|
||||
|
||||
|
||||
class YOLOv8TFLite:
|
||||
"""A YOLOv8 object detection class using TensorFlow Lite for efficient inference.
|
||||
|
||||
This class handles model loading, preprocessing, inference, and visualization of detection results for YOLOv8 models
|
||||
converted to TensorFlow Lite format.
|
||||
|
||||
Attributes:
|
||||
model (Interpreter): TensorFlow Lite interpreter for the YOLOv8 model.
|
||||
conf (float): Confidence threshold for filtering detections.
|
||||
iou (float): Intersection over Union threshold for non-maximum suppression.
|
||||
classes (dict): Dictionary mapping class IDs to class names.
|
||||
color_palette (np.ndarray): Random color palette for visualization with shape (num_classes, 3).
|
||||
in_width (int): Input width required by the model.
|
||||
in_height (int): Input height required by the model.
|
||||
in_index (int): Input tensor index in the model.
|
||||
in_scale (float): Input quantization scale factor.
|
||||
in_zero_point (int): Input quantization zero point.
|
||||
int8 (bool): Whether the model uses int8 quantization.
|
||||
out_index (int): Output tensor index in the model.
|
||||
out_scale (float): Output quantization scale factor.
|
||||
out_zero_point (int): Output quantization zero point.
|
||||
|
||||
Methods:
|
||||
letterbox: Resize and pad image while maintaining aspect ratio.
|
||||
draw_detections: Draw bounding boxes and labels on the input image.
|
||||
preprocess: Preprocess the input image before inference.
|
||||
postprocess: Process model outputs to extract and visualize detections.
|
||||
detect: Perform object detection on an input image.
|
||||
|
||||
Examples:
|
||||
Initialize detector and run inference
|
||||
>>> detector = YOLOv8TFLite("yolov8n.tflite", conf=0.25, iou=0.45)
|
||||
>>> result = detector.detect("image.jpg")
|
||||
>>> cv2.imshow("Result", result)
|
||||
"""
|
||||
|
||||
def __init__(self, model: str, conf: float = 0.25, iou: float = 0.45, metadata: str | None = None):
|
||||
"""Initialize the YOLOv8TFLite detector.
|
||||
|
||||
Args:
|
||||
model (str): Path to the TFLite model file.
|
||||
conf (float): Confidence threshold for filtering detections.
|
||||
iou (float): IoU threshold for non-maximum suppression.
|
||||
metadata (str | None): Path to the metadata file containing class names.
|
||||
"""
|
||||
self.conf = conf
|
||||
self.iou = iou
|
||||
if metadata is None:
|
||||
self.classes = {i: i for i in range(1000)}
|
||||
else:
|
||||
with open(metadata) as f:
|
||||
self.classes = yaml.safe_load(f)["names"]
|
||||
np.random.seed(42) # Set seed for reproducible colors
|
||||
self.color_palette = np.random.uniform(128, 255, size=(len(self.classes), 3))
|
||||
|
||||
# Initialize the TFLite interpreter
|
||||
self.model = Interpreter(model_path=model)
|
||||
self.model.allocate_tensors()
|
||||
|
||||
# Get input details
|
||||
input_details = self.model.get_input_details()[0]
|
||||
self.in_width, self.in_height = input_details["shape"][1:3]
|
||||
self.in_index = input_details["index"]
|
||||
self.in_scale, self.in_zero_point = input_details["quantization"]
|
||||
self.int8 = input_details["dtype"] == np.int8
|
||||
|
||||
# Get output details
|
||||
output_details = self.model.get_output_details()[0]
|
||||
self.out_index = output_details["index"]
|
||||
self.out_scale, self.out_zero_point = output_details["quantization"]
|
||||
|
||||
def letterbox(
|
||||
self, img: np.ndarray, new_shape: tuple[int, int] = (640, 640)
|
||||
) -> tuple[np.ndarray, tuple[float, float]]:
|
||||
"""Resize and pad image while maintaining aspect ratio.
|
||||
|
||||
Args:
|
||||
img (np.ndarray): Input image with shape (H, W, C).
|
||||
new_shape (tuple[int, int]): Target shape (height, width).
|
||||
|
||||
Returns:
|
||||
(np.ndarray): Resized and padded image.
|
||||
(tuple[float, float]): Padding ratios (top/height, left/width) for coordinate adjustment.
|
||||
"""
|
||||
shape = img.shape[:2] # Current shape [height, width]
|
||||
|
||||
# Scale ratio (new / old)
|
||||
r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])
|
||||
|
||||
# Compute padding
|
||||
new_unpad = round(shape[1] * r), round(shape[0] * r)
|
||||
dw, dh = (new_shape[1] - new_unpad[0]) / 2, (new_shape[0] - new_unpad[1]) / 2 # wh padding
|
||||
|
||||
if shape[::-1] != new_unpad: # Resize if needed
|
||||
img = cv2.resize(img, new_unpad, interpolation=cv2.INTER_LINEAR)
|
||||
top, bottom = round(dh - 0.1), round(dh + 0.1)
|
||||
left, right = round(dw - 0.1), round(dw + 0.1)
|
||||
img = cv2.copyMakeBorder(img, top, bottom, left, right, cv2.BORDER_CONSTANT, value=(114, 114, 114))
|
||||
|
||||
return img, (top / img.shape[0], left / img.shape[1])
|
||||
|
||||
def draw_detections(self, img: np.ndarray, box: np.ndarray, score: np.float32, class_id: int) -> None:
|
||||
"""Draw bounding boxes and labels on the input image based on detected objects.
|
||||
|
||||
Args:
|
||||
img (np.ndarray): The input image to draw detections on.
|
||||
box (np.ndarray): Detected bounding box in the format [x1, y1, width, height].
|
||||
score (np.float32): Confidence score of the detection.
|
||||
class_id (int): Class ID for the detected object.
|
||||
"""
|
||||
x1, y1, w, h = box
|
||||
color = self.color_palette[class_id]
|
||||
|
||||
# Draw bounding box
|
||||
cv2.rectangle(img, (int(x1), int(y1)), (int(x1 + w), int(y1 + h)), color, 2)
|
||||
|
||||
# Create label with class name and score
|
||||
label = f"{self.classes[class_id]}: {score:.2f}"
|
||||
|
||||
# Get text size for background rectangle
|
||||
(label_width, label_height), _ = cv2.getTextSize(label, cv2.FONT_HERSHEY_SIMPLEX, 0.5, 1)
|
||||
|
||||
# Position label above or below box depending on space
|
||||
label_x = x1
|
||||
label_y = y1 - 10 if y1 - 10 > label_height else y1 + 10
|
||||
|
||||
# Draw label background
|
||||
cv2.rectangle(
|
||||
img,
|
||||
(int(label_x), int(label_y - label_height)),
|
||||
(int(label_x + label_width), int(label_y + label_height)),
|
||||
color,
|
||||
cv2.FILLED,
|
||||
)
|
||||
|
||||
# Draw text
|
||||
cv2.putText(img, label, (int(label_x), int(label_y)), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 0, 0), 1, cv2.LINE_AA)
|
||||
|
||||
def preprocess(self, img: np.ndarray) -> tuple[np.ndarray, tuple[float, float]]:
|
||||
"""Preprocess the input image before performing inference.
|
||||
|
||||
Args:
|
||||
img (np.ndarray): The input image to be preprocessed with shape (H, W, C).
|
||||
|
||||
Returns:
|
||||
(np.ndarray): Preprocessed image ready for model input.
|
||||
(tuple[float, float]): Padding ratios for coordinate adjustment.
|
||||
"""
|
||||
img, pad = self.letterbox(img, (self.in_width, self.in_height))
|
||||
img = img[..., ::-1][None] # BGR to RGB and add batch dimension (N, H, W, C) for TFLite
|
||||
img = np.ascontiguousarray(img)
|
||||
img = img.astype(np.float32)
|
||||
return img / 255, pad # Normalize to [0, 1]
|
||||
|
||||
def postprocess(self, img: np.ndarray, outputs: np.ndarray, pad: tuple[float, float]) -> np.ndarray:
|
||||
"""Process model outputs to extract and visualize detections.
|
||||
|
||||
Args:
|
||||
img (np.ndarray): The original input image.
|
||||
outputs (np.ndarray): Raw model outputs.
|
||||
pad (tuple[float, float]): Padding ratios from preprocessing.
|
||||
|
||||
Returns:
|
||||
(np.ndarray): The input image with detections drawn on it.
|
||||
"""
|
||||
# Adjust coordinates based on padding and scale to original image size
|
||||
outputs[:, 0] -= pad[1]
|
||||
outputs[:, 1] -= pad[0]
|
||||
outputs[:, :4] *= max(img.shape)
|
||||
|
||||
# Transform outputs to [x, y, w, h] format
|
||||
outputs = outputs.transpose(0, 2, 1)
|
||||
outputs[..., 0] -= outputs[..., 2] / 2 # x center to top-left x
|
||||
outputs[..., 1] -= outputs[..., 3] / 2 # y center to top-left y
|
||||
|
||||
for out in outputs:
|
||||
# Get scores and apply confidence threshold
|
||||
scores = out[:, 4:].max(-1)
|
||||
keep = scores > self.conf
|
||||
boxes = out[keep, :4]
|
||||
scores = scores[keep]
|
||||
class_ids = out[keep, 4:].argmax(-1)
|
||||
|
||||
# Apply non-maximum suppression
|
||||
indices = cv2.dnn.NMSBoxes(boxes, scores, self.conf, self.iou).flatten()
|
||||
|
||||
# Draw detections that survived NMS
|
||||
[self.draw_detections(img, boxes[i], scores[i], class_ids[i]) for i in indices]
|
||||
|
||||
return img
|
||||
|
||||
def detect(self, img_path: str) -> np.ndarray:
|
||||
"""Perform object detection on an input image.
|
||||
|
||||
Args:
|
||||
img_path (str): Path to the input image file.
|
||||
|
||||
Returns:
|
||||
(np.ndarray): The output image with drawn detections.
|
||||
"""
|
||||
# Load and preprocess image
|
||||
img = cv2.imread(img_path)
|
||||
x, pad = self.preprocess(img)
|
||||
|
||||
# Apply quantization if model is int8
|
||||
if self.int8:
|
||||
x = (x / self.in_scale + self.in_zero_point).astype(np.int8)
|
||||
|
||||
# Set input tensor and run inference
|
||||
self.model.set_tensor(self.in_index, x)
|
||||
self.model.invoke()
|
||||
|
||||
# Get output and dequantize if necessary
|
||||
y = self.model.get_tensor(self.out_index)
|
||||
if self.int8:
|
||||
y = (y.astype(np.float32) - self.out_zero_point) * self.out_scale
|
||||
|
||||
# Process detections and return result
|
||||
return self.postprocess(img, y, pad)
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
parser = argparse.ArgumentParser()
|
||||
parser.add_argument(
|
||||
"--model",
|
||||
type=str,
|
||||
default="yolov8n_saved_model/yolov8n_full_integer_quant.tflite",
|
||||
help="Path to TFLite model.",
|
||||
)
|
||||
parser.add_argument("--img", type=str, default=str(ASSETS / "bus.jpg"), help="Path to input image")
|
||||
parser.add_argument("--conf", type=float, default=0.25, help="Confidence threshold")
|
||||
parser.add_argument("--iou", type=float, default=0.45, help="NMS IoU threshold")
|
||||
parser.add_argument("--metadata", type=str, default="yolov8n_saved_model/metadata.yaml", help="Metadata yaml")
|
||||
args = parser.parse_args()
|
||||
|
||||
detector = YOLOv8TFLite(args.model, args.conf, args.iou, args.metadata)
|
||||
result = detector.detect(args.img)
|
||||
|
||||
cv2.imshow("Output", result)
|
||||
cv2.waitKey(0)
|
||||
Reference in New Issue
Block a user